
分析师:谷诚
灵巧手是人形机器人末端执行器核心方案,当前技术路线尚未收敛,下游客户 个性化、定制化需求特征明显,整手和模组厂商将会获得竞争优势。
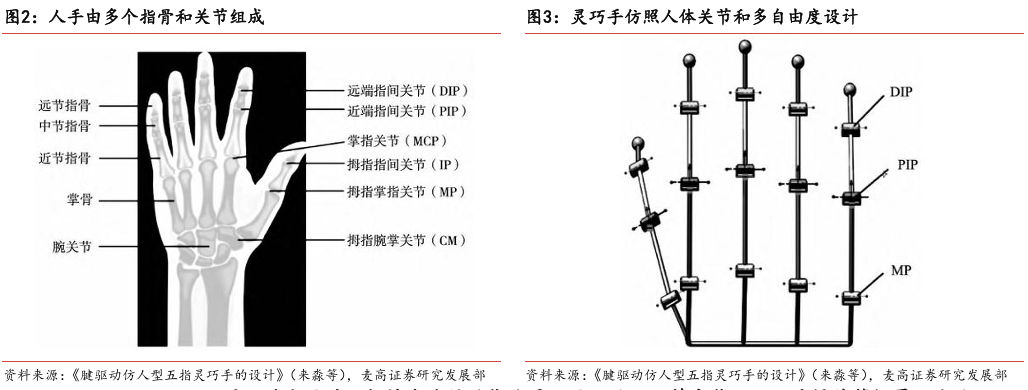
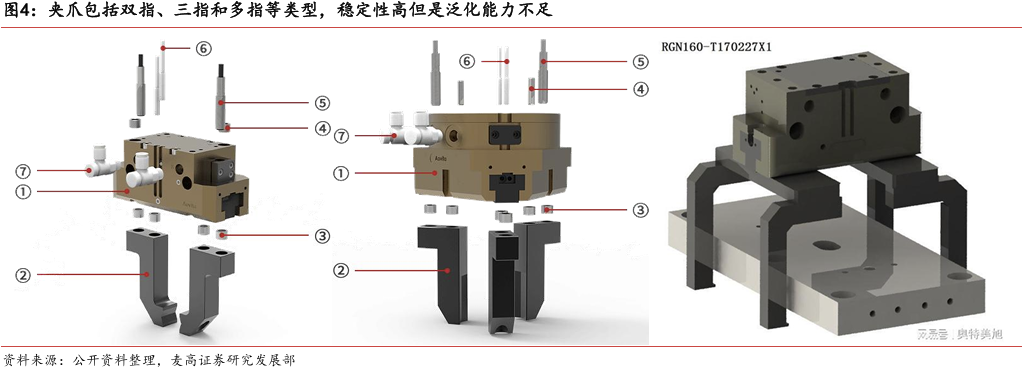
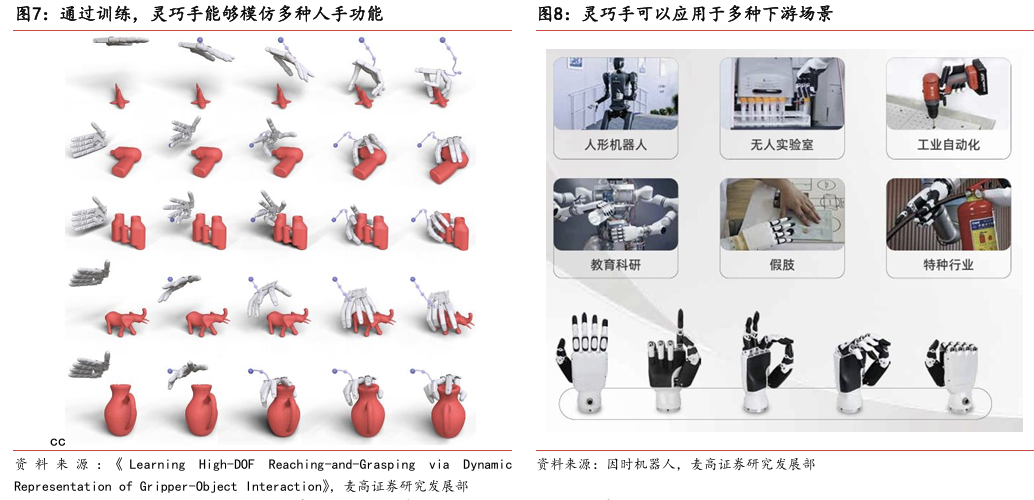
灵巧手是人形机器人末端执行器核心解决方案。灵巧手以人手为模仿对象,集 成驱动系统、传动系统、感知系统,灵活性较强,但是成本更高并且可靠性和 易维护性较低。灵巧手与夹爪的核心差异在于灵巧手具有更高的自由度,能够 进行更复杂的抓取操作,但是对算法模型的泛化能力提出了更高的要求。夹爪 泛化能力有限但是稳定性高,适合工业应用场景。灵巧手泛化能力强, 适配更复杂的应用场景,是人形机器人的优选解决方案。
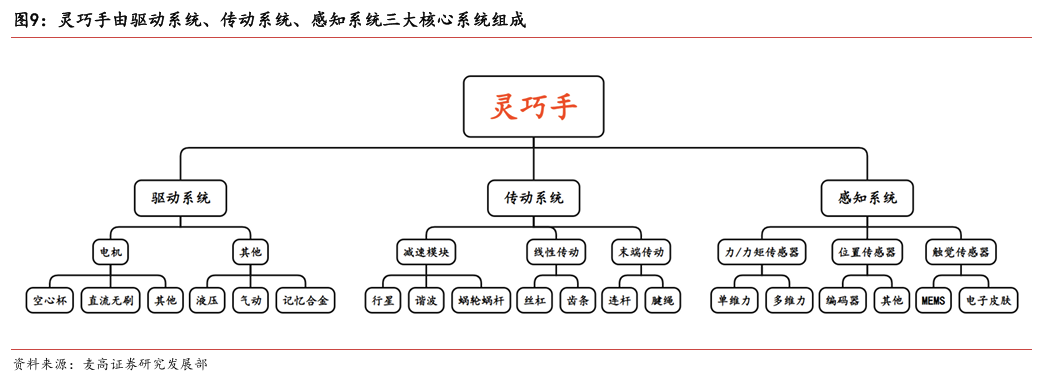
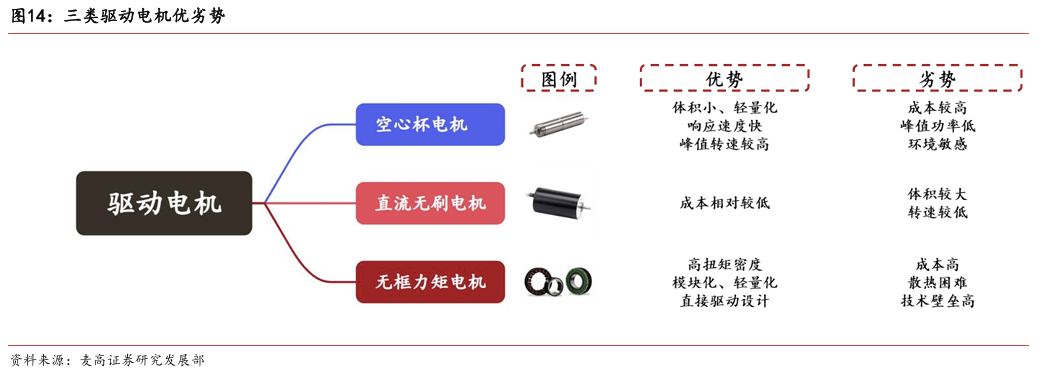
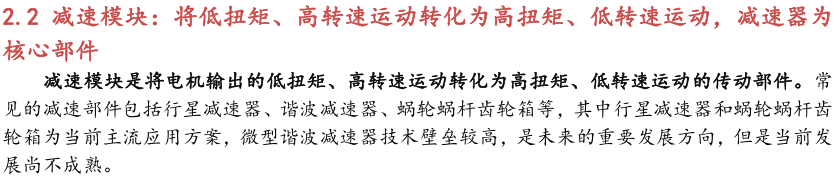
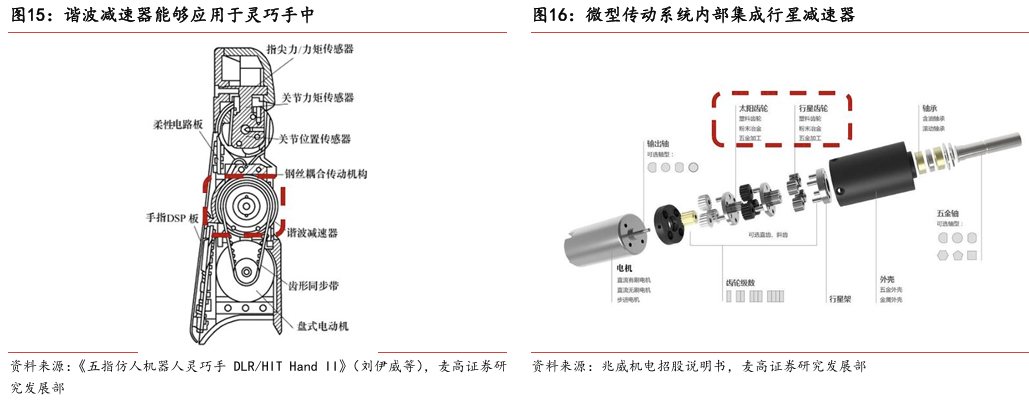
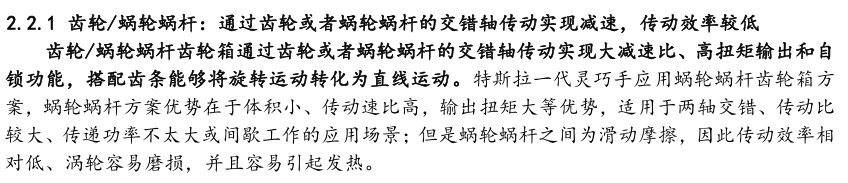
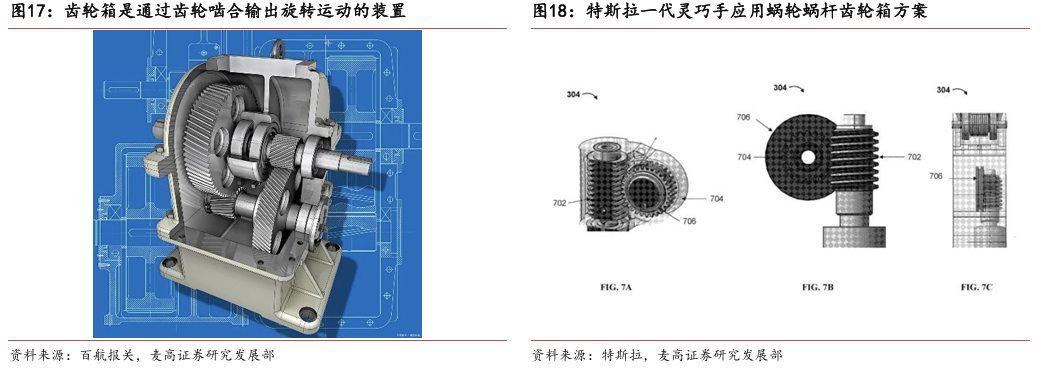
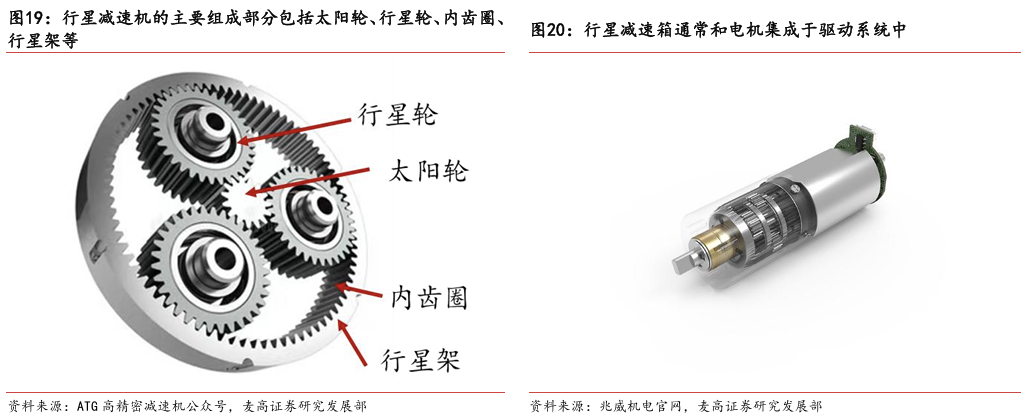
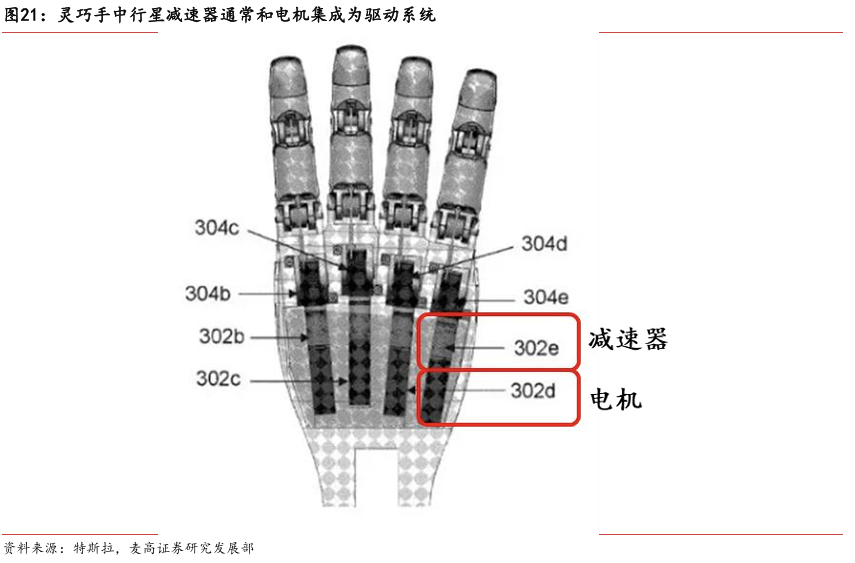
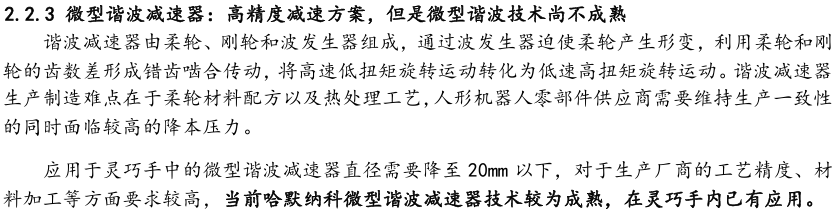
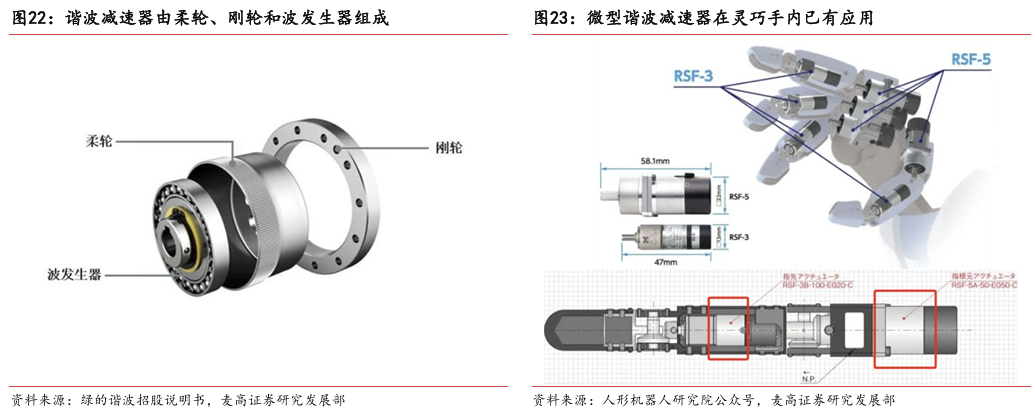
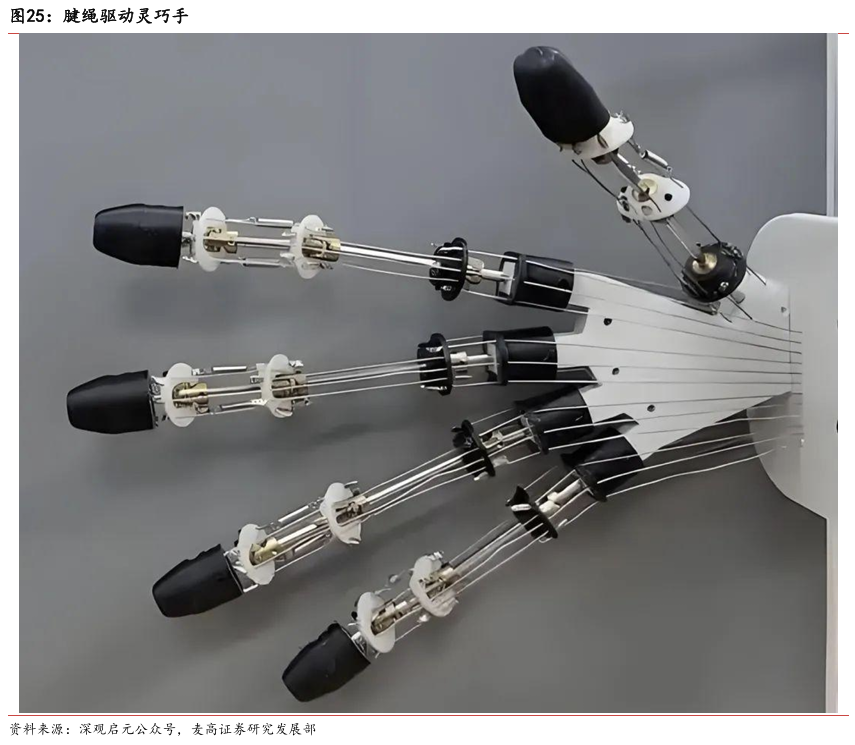
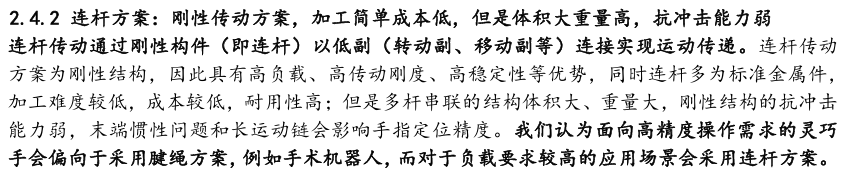
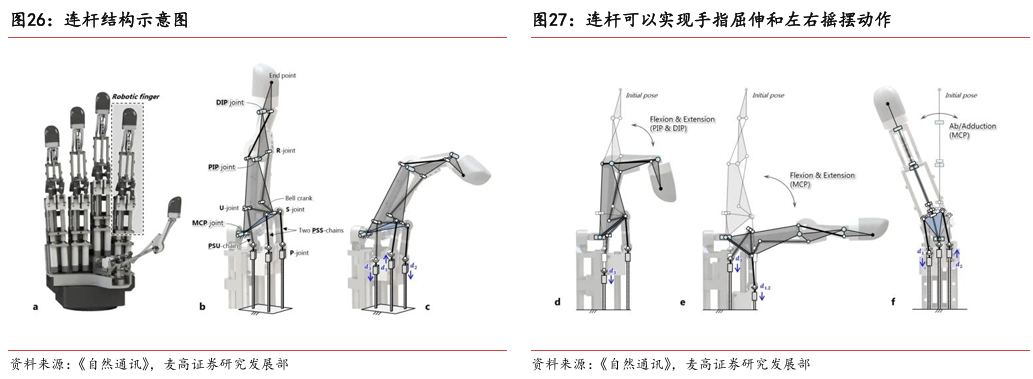
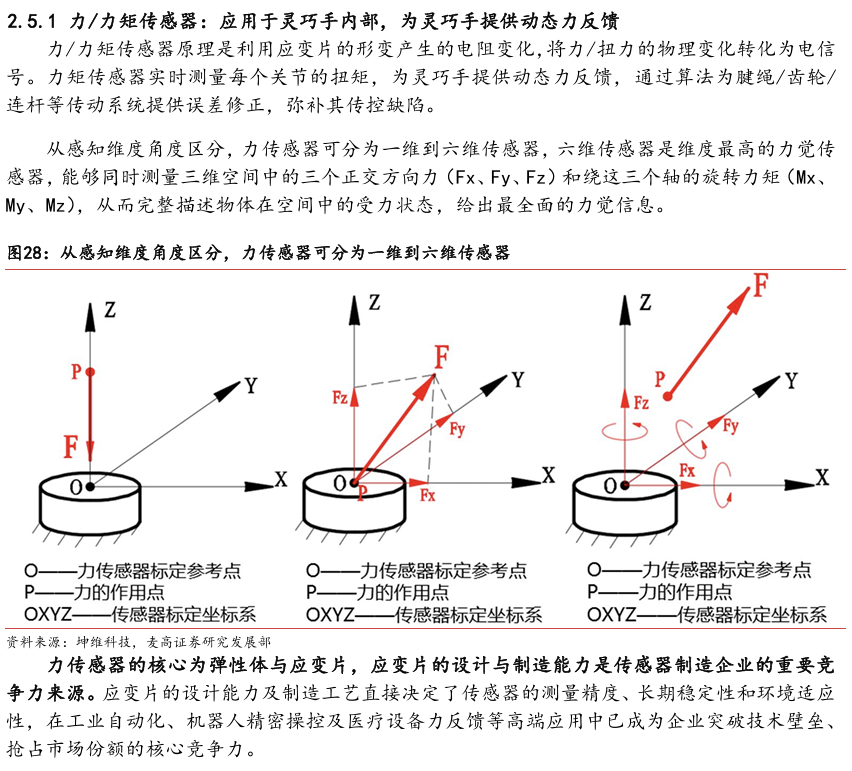
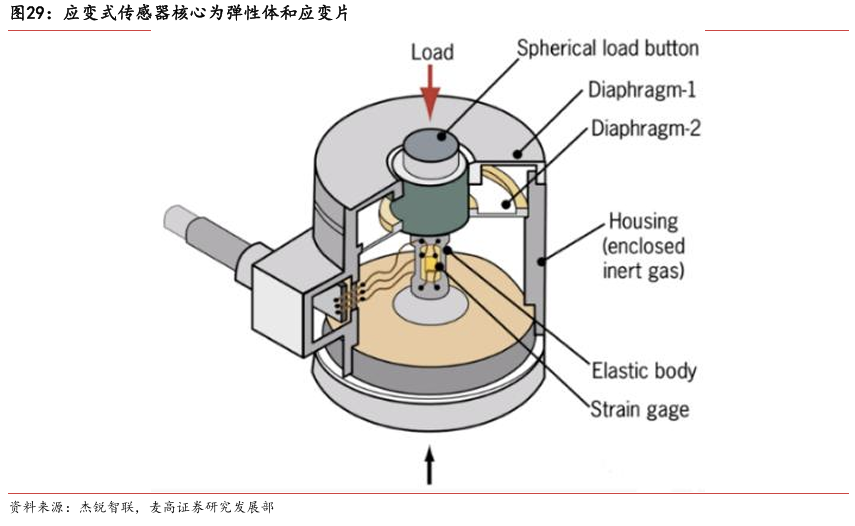
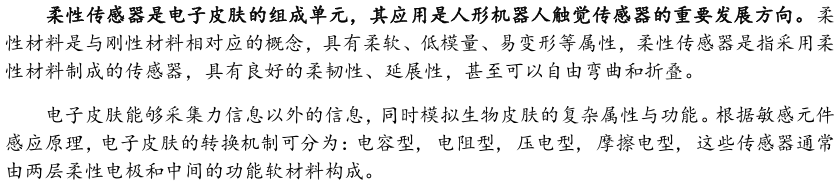
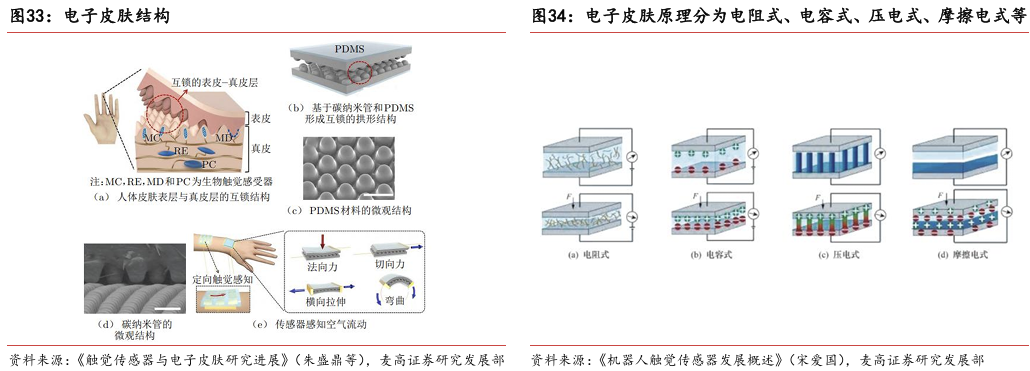
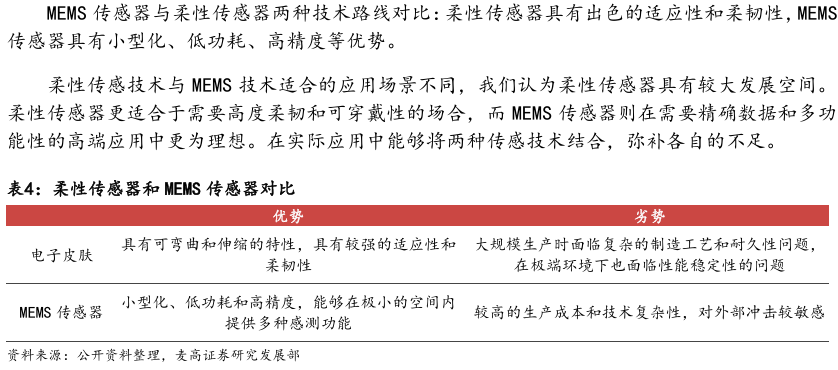
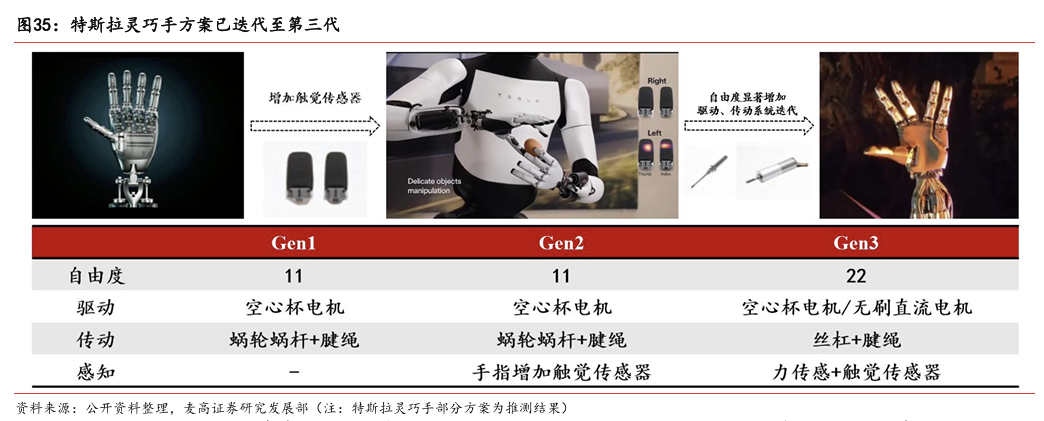
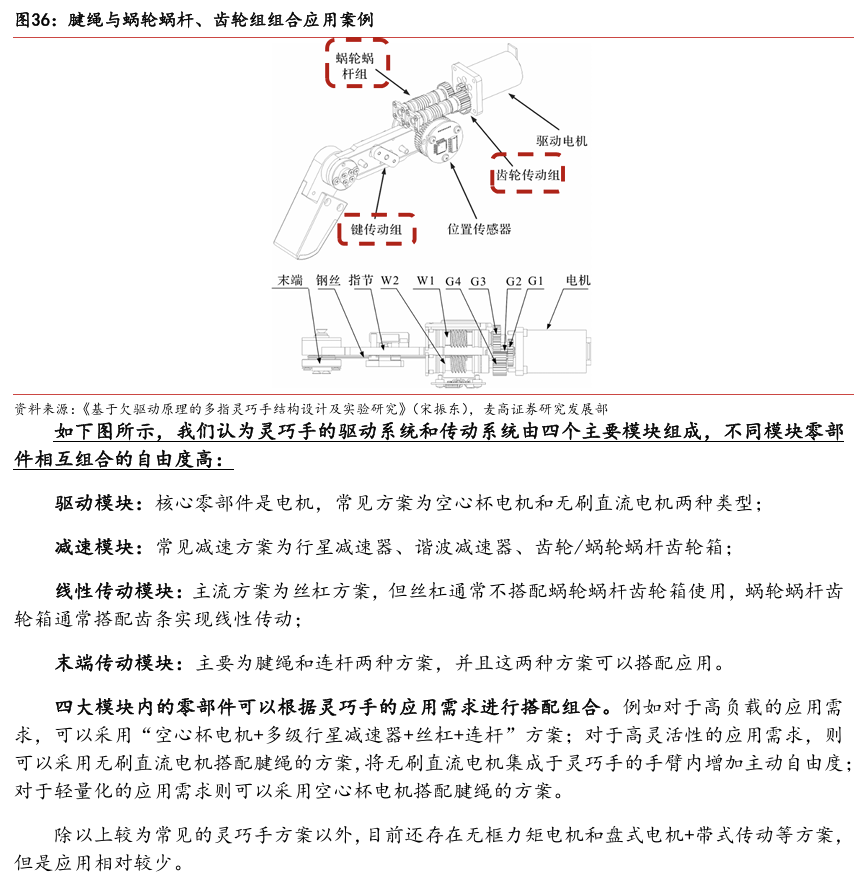
灵巧手由驱动系统、传动系统、感知系统三大核心系统组成。(1)驱动系统: 包括电机驱动、液压驱动、气动驱动和记忆合金驱动,电机驱动空心杯电机体 积小、转速高、功率密度大、响应速度快,是当前主流应用方案。(2)传动系统:包括减速模块、线性传动模块和末端传动模块,减速方案中行星减速器和 蜗轮蜗杆齿轮箱应用较多,微型谐波方案尚不成熟;微型丝杠中行星滚柱丝杠与滚珠丝杠均能够应用,但是行星滚柱丝杠体积相对较大,滚珠丝杠适配性更高;末端传动方案包括腱绳和连杆方案,腱绳方案节省空间适合高自由度灵巧手应用,连杆方案刚性更强负载更高。(3)感知系统:包括力矩传感器、位置传感器和触觉传感器,力传感以一维力为主,位置传感器以编码器为主,触觉传感器MEMS路线应用较多,未来电子皮肤用量有望提升。
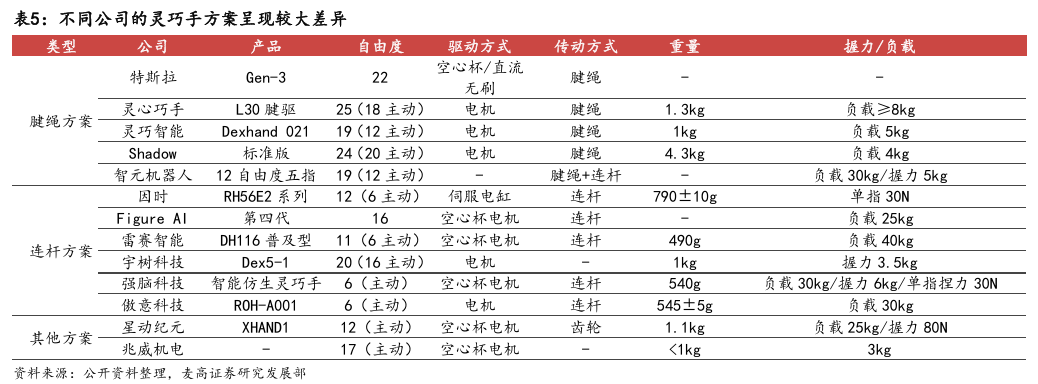
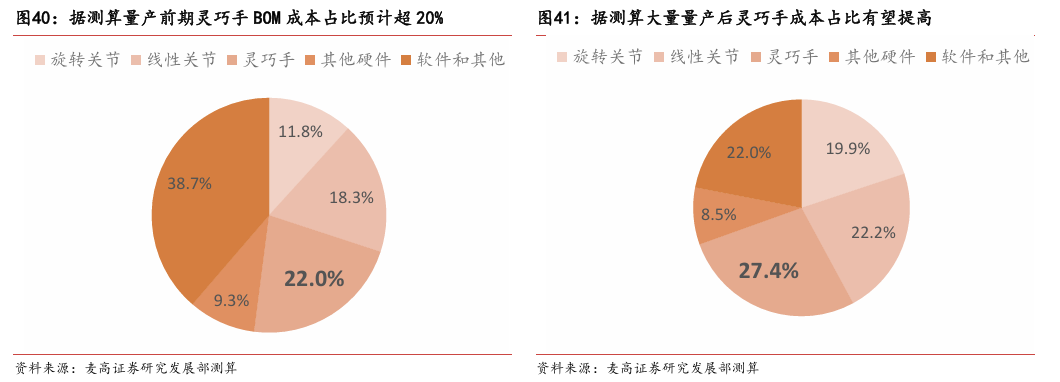
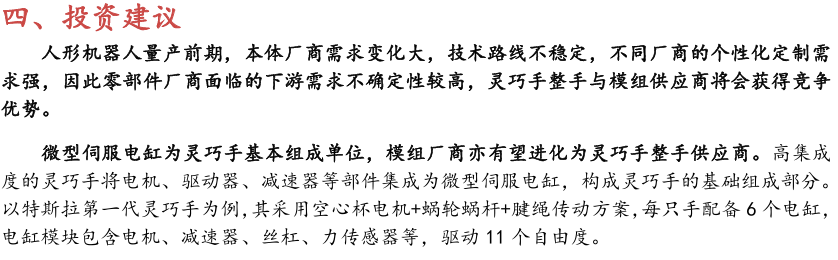
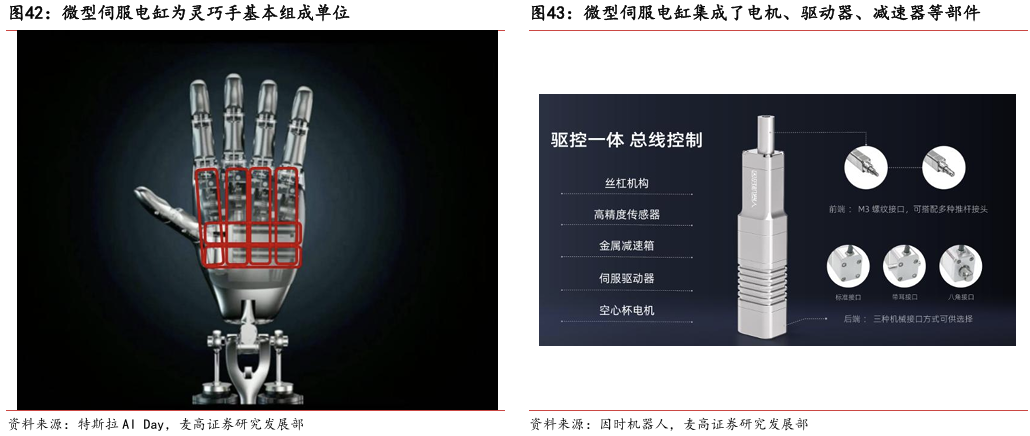
当前人形机器人灵巧手主要存在以下几种发展趋势:(1)灵巧手技术 路线短期内不会收敛,多种技术路线呈现共同发展状态;(2)未来灵巧手自由度会进一步提高,触觉传感器单价下降但是用量增加,灵巧手单机价值量占比有望相对提高;( 3)灵巧手研发投入大、周期长,占人形机器人工程量的一半, 因此多数本体厂商需和外部供应商合作。综上所述,人形机器人量产前期,本体厂商需求变化大,技术路线不稳定,不同厂商的个性化定制需求强,因此零部件厂商面临的下游需求不确定性较高,灵巧手整手与模组供应商将会获得竞争优势。


























免责声明:
1、我们整理和转载此文出于传播更多资讯之目的,不代表本号观点,亦不构成任何投资观点,由此做出的投资决策与本人本文无关!
3、本文所用的视频、图片、文字如涉及作品版权问题,请第一时间联系小编:16620948826(同微信),我们将立即删除,无任何商业用途!
