一、灵巧手定义
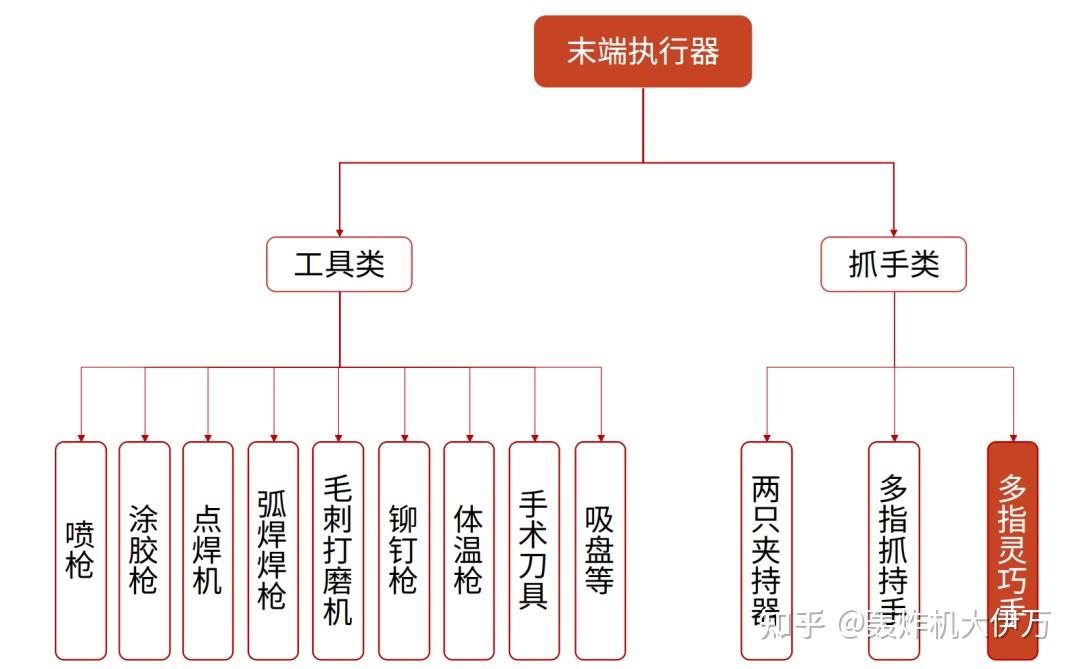
末端执行器 (End Effector) 是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器按其功能可以分为两大类,即:工具类和抓手类。工具类末端执行器是根据具体工作需求专门设计并预留标准化接口的机器人专用工具,可以直接实现具体的加工工种、生产工艺或日常动作;抓手类机器人末端执行器恰如人的双手,担负着执行各种动作、抓持和操作的任务。
来源:蔡世波《机器人多指灵巧手的研究现状、趋势与挑战》
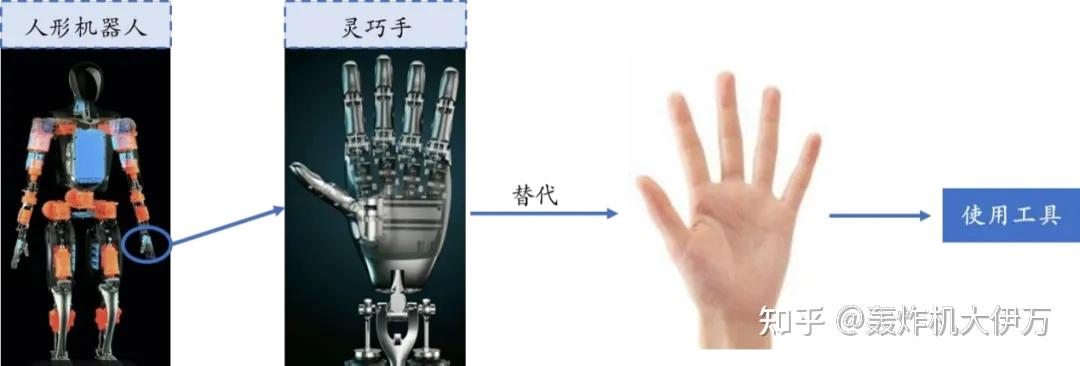
灵巧手是一种新型的末端执行器,以人手的结构和功能为模仿对象,在机器人与环境的交互中起着关键作用,目前主要应用在航空航天、医疗、智能制造等领域。随着机器人技术的发展,人形机器人领域有望成为灵巧手未来的主流应用领域。
来源:搜狐网,拓博尔机器人,智能制造网,特斯拉AI DAY 2022,华安证券研究所
机器人多指灵巧手与普通的机器人末端执行器的主要区别是,普通的末端执行器一般是针对特定任务设计的末端执行器。而灵巧手是为多任务而研究开发的一种智能型通用机械手,灵巧的抓取是任务操作的先决条件,它们模拟人类手部的复杂运动和功能,以实现更加精细和多样化的操作任务。灵巧指的是手的姿势可变性,这种可变性越高,则认为手就越灵巧。
多指灵巧手的研究和发展经历了几个关键阶段:
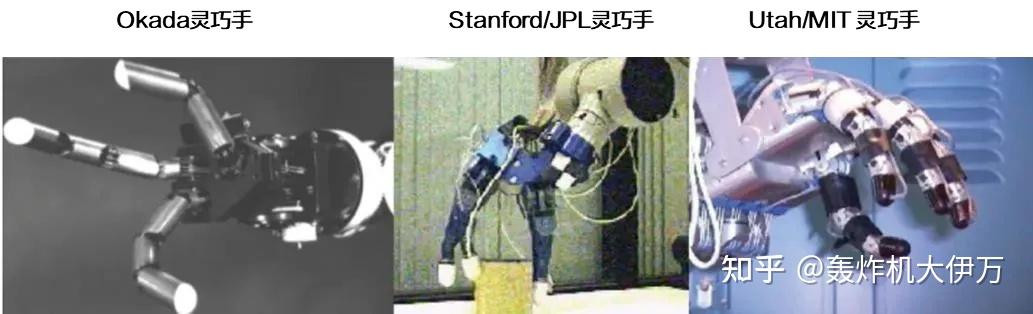
初始阶段(20世纪70年代):这一时期,多指灵巧手的研究主要集中在模仿人类手部的基本功能,使用腱驱动和电机驱动技术。这一阶段的代表性作品包括日本的Okada灵巧手、美国的Stanford/JPL灵巧手以及Utah/MIT灵巧手,它们为后续研究奠定了理论基础。
快速发展阶段(20世纪末):随着嵌入式硬件技术的发展,多指灵巧手开始集成更多的传感器和更高级的控制系统,以提高其灵活性和感知能力。例如,德国宇航中心研制的DLR-Ⅰ和DLR-Ⅱ灵巧手集成了多达25个传感器,包括触觉、扭矩、位置和温度传感器,显著提升了灵巧手的性能。
最近十年:多指灵巧手的设计越来越注重系统集成度和感知能力,以实现更复杂的操作和更精确的控制,但是复杂的系统导致了高额的制造成本并且降低了系统的可靠性和易维护性。因此,近十年,多指灵巧手设计的一个重要方向是简化系统与提高鲁棒性,设计趋向于简化系统结构,以降低制造成本,提高系统的可靠性和易维护性,同时保持或提升其功能性。
多指灵巧手的研究和发展是一个跨学科的领域,涉及机械工程、电子工程、计算机科学、材料科学等多个学科。随着技术的进步,未来的多指灵巧手将更加智能化、灵活化,并可能在医疗、制造、服务等多个领域得到广泛应用。
二、灵巧手分类
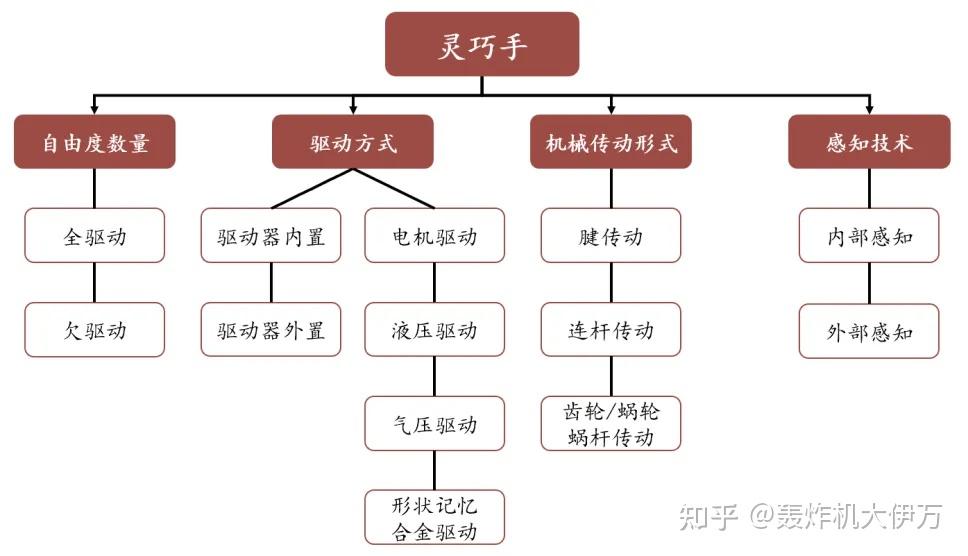
灵巧手种类繁多,可根据自由度数量、驱动方式、传动机构、感知技术等进行分类。
来源:刘伟等《机器人灵巧手研究综述》,小米技术公众号
1、按照自由度分类
根据自由度与驱动源数量,灵巧手可分为全驱动和欠驱动两类。
两者的差异在于,全驱动灵巧手的驱动源数量和被控灵巧手的自由度数量相等,欠驱动则由于被控制的自由度多余驱动源数目,缺少驱动源的部分进行耦合随动。相比全驱动灵巧手,欠驱动整体更加简洁、鲁棒性较高,但是难以执行高精度的操作。
手指拥有两种运动形式,通过各指节旋转副的屈曲/前伸运动以及通过手指末端球形副的侧摆运动。我们暂且定义每根手指屈曲的方向为 Pitch,侧摆的方向为 Roll,那么对于 Pitch 方向的自由度,每根手指都有 3个,共 15个,对于 Roll方向的自由度,大拇指有 2个自由度,其余手指各 1个,共 6 个。整手通过这 21 个自由度,实现了复杂多变的人手运动形式。由于真实人手的高自由度、结构紧凑、复杂等特征,绝大多数机械手都无法完美复制人手的功能,其设计和功能都是在某些特定场合和功能要求下的简化和权衡。根据严玺《仿人灵巧手的结构设计及其控制研究》,在通常情况下,灵巧手只需要 3 根3 自由度的手指即可完成大多数任务。

2、按驱动方式分类
驱动系统是整个系统的动力源,是系统输出力的保证。按照驱动方式有两种分类方法:第一类:根据驱动器是否布置在手指内,可分为三种:驱动器内置、驱动器外置、驱动器混合置。第二类:根据驱动方式可以分为液压驱动、电机驱动、气压驱动、形状记忆合金驱动四类。
3、根据传动形式分类
机器人灵巧手传动系统把驱动器产生的运动合力以一定的方式传递到手指关节,从而使关节做相应的运动,传动系统的设计与驱动器密切相关。虽然驱动源是影响灵巧手体积重量的重要因素,但是抓取稳定性和灵活性等重要指标取决于传动系统。
灵巧手按照传动机构分类可分为腱绳传动、齿轮/蜗轮蜗杆传动与连杆传动。
4、根据感知技术分类
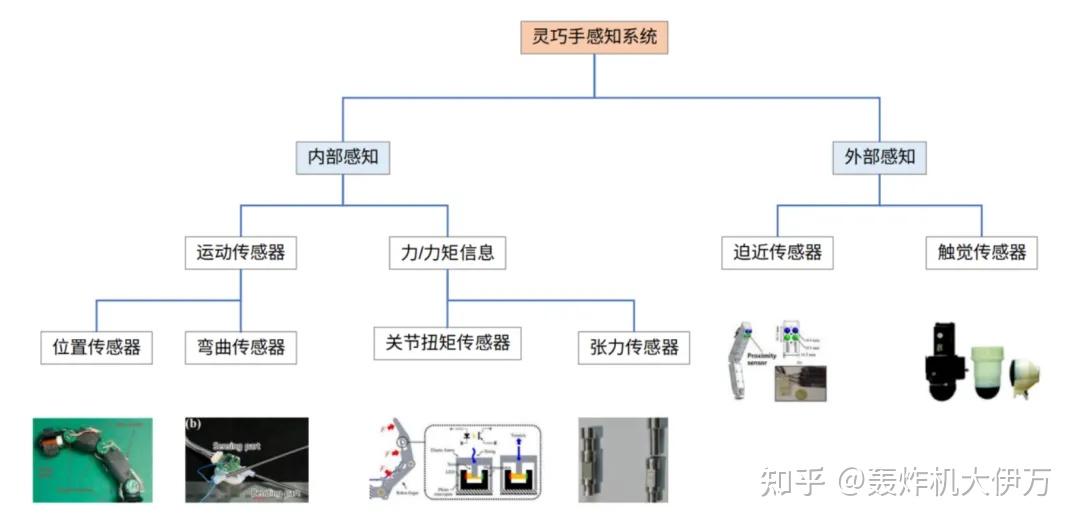
机器人灵巧手的感知技术可以分为内部感知和外部感知。内部感知用于感知运动参数如位置、速度、加速度等,可以使灵巧手更好地了解自己的状态,内部感知包括位置传感器、弯曲传感器和张力传感器。外部感知则针对周围环境的信息检测,包括近端传感器、触觉传感器和多模态传感器。在操作前阶段,使用近端传感器来检测物体与机械手之间的距离。当机械手接触到物体时,触觉传感器用于提供物体的物理信息和接触力。
三、灵巧手感知系统
接前文,根据传感器在机器人手中的布局和功能,可将传感器分为两类:内在传感器和外在传感器。
来源:Ziwei Xia《Dexhand aSpace qualified multi-fingered robotic hand》
1、外部感知传感器
1.1、触觉传感器
触觉传感器是机器人技术中非常重要的组成部分,它们使得机器人能够更加精细和准确地感知和交互其周围的环境。下面是几种触觉传感器各有其特点和应用场景:
- 压阻式触觉传感器:它们通过测量材料电阻的变化来检测压力,适合于需要大测量范围和较好鲁棒性的应用。
- 压电式触觉传感器:利用压电材料在受力时产生的电压变化来检测压力,具有快速响应和较宽的频率响应范围,但可能在分辨率上有所不足。
- 电容式触觉传感器:通过测量电容的变化来检测接触力,具有高空间分辨率和低功耗的优点,但可能在抗干扰能力上有所欠缺。
- 电磁式触觉传感器:这类传感器较少见,可能利用电磁感应原理来检测物体的接近或接触。
- 基于光学的触觉传感器:通过检测光的参数变化来感知接触,具有高空间分辨率和强抗干扰能力。
每种类型的传感器都有其优势和局限性,因此在设计机器人或自动化系统时,需要根据具体的应用需求和环境条件来选择合适的触觉传感器。此外,触觉传感器的数据通常需要通过高级的数据融合和信号处理技术来提取有用的信息,以实现更准确的感知和决策。随着技术的发展,未来的触觉传感器可能会集成更多智能算法,提供更加丰富和精确的感知能力。
触觉传感器的发展确实经历了几个重要的阶段,每个阶段都代表了技术的进步和对复杂任务处理能力的增强。
- 早期触觉传感器:主要集中于测量指尖的力,这些传感器基于压电效应,能够检测力的方向,但对接触位置的检测不够精确。它们通常包括一维、二维、六维力/力矩传感器。
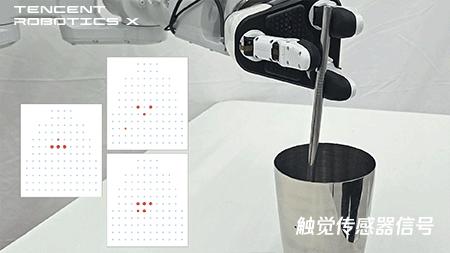
- 多阵列触觉传感器:为了解决早期传感器的局限性,发展出了多阵列触觉传感器。这些传感器使用柔性材料和压阻单元点阵列,提高了对接触位置的分辨率。例如,腾讯的灵巧手 TRX-Hand 在指尖、指腹和掌面都配备了高灵敏度的柔性触觉传感器阵列。
- 第三阶段的发展方向:
- 多模态传感器:这些传感器能够同时获取多种触觉信息,如重量、大小、温度、质地等。光学触觉传感器是多模态传感器的一个例子,它们可以提供接触位置、温度、粗糙度、刚度、纹理和形状等信息。
- 多区域感知传感器:这个方向的研究致力于开发能够覆盖整个机器人手的电子皮肤,以实现更广泛的触觉感知,而不仅仅是指尖。
此外,触觉传感器的发展也与机器人手的其他感官系统相结合,如视觉传感器,以提高机器人手的交互能力和环境适应性。尽管视觉传感器在物体识别方面相对成熟,但它们可能受到复杂背景等外部环境因素的影响。触觉传感器可以提供视觉无法获得的信息,如物体的软硬程度或表面纹理,这对于优化机器人手的抓握和操作能力至关重要。
触觉传感器的技术实现路径呈现多样化趋势,其中目前主要有MEMS和电子皮肤两种主流技术路线。
- MEMS压力阵列触觉传感器:
MEMS压力阵列触觉传感器利用微机电系统技术,制造出对压力非常敏感的微小机械结构。这些结构能够在受到压力作用时检测到变化,并将这种机械压力转换为电信号。这类传感器以其高精度和高灵敏度,在需要精细力控制的应用场合中特别有用。特斯拉Optimus Gen2灵巧手指部分使用的触觉传感器,就是一种能够精准抓取如鸡蛋等易碎物品的列阵式触觉传感器,其手指的每个动作都由高性能的MEMS传感器支持,这些传感器能够实时显示手指压力,确保对物体的柔和抓握 。
- 柔性触觉传感器(电子皮肤):
柔性触觉传感器又称为“电子皮肤”,是一种先进的传感技术,能够模拟人类皮肤对外界力学量的感知,如压力、拉伸和弯曲等。这些传感器具有高灵敏度、高柔韧性、快速响应和良好的延展性,可以适应各种形状和运动,使得它们在设计和应用上具有更大的灵活性。
自供电方式是电子皮肤发展中的一个重要方向,它允许设备在没有外部电源的情况下工作,主要有压电、摩擦电和热电三种:
- 压电:通过材料的压电效应将机械能转换为电能,研究较早,已取得许多成果。
- 摩擦电:作为一种新兴的能源供给方式,通过摩擦起电现象产生电能,近年来发展迅速。
- 热电:通过热电效应将热能转换为电能,同时可以实现温度监控,对于多信号检测具有潜在的应用价值。
随着材料科学和微纳技术的进步,未来的触觉传感器将更加智能化和集成化,能够提供更加丰富和精确的触觉反馈。集成多种传感功能和自供电技术的触觉传感器将是未来研究的重点方向。
1.2、接近/迫近传感器
接近传感器用于为机器人提供检测表面和物体的能力。在抓取或操纵物体之前,感知物体与机器人手之间的相对位置。借助接近传感器,机械手可以在操作之前估计物体的位置、形状和其他物理信息。接近传感器的类型包括但不限于超声波传感器、红外传感器、激光传感器和电容传感器,每种传感器都有其特定的应用场景和优势。对于灵巧手来说,提前了解这些信息有助于提升操作的成功率。
2、内部感知传感器
2.1、力/力矩传感器
(1)关节扭矩传感器
关节扭矩传感器是机器人灵巧手中的一种重要内部传感器,它们的作用是提供关节在运动过程中所受扭矩的实时反馈。这种反馈信息对于确保灵巧手的稳定、精确和灵活操作至关重要。关节扭矩传感器的集成提高了机器人灵巧手的智能化水平,使其能够更好地与人类工作者协作,或者在没有人类指导的情况下独立完成复杂的任务。随着机器人技术的不断进步,关节扭矩传感器的精度和可靠性也将持续提升,进一步推动机器人在更多领域的应用。
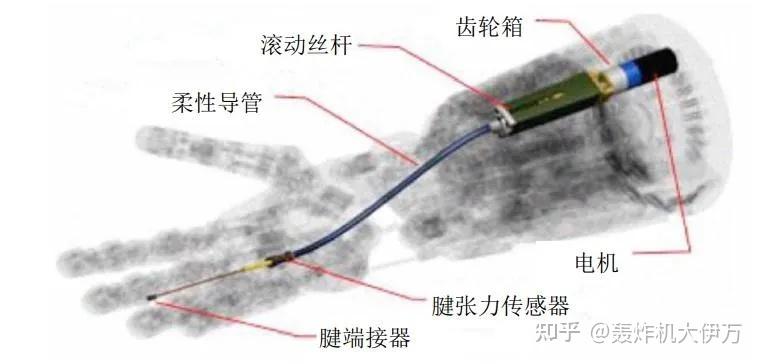
(2)腱绳张力传感器
腱绳张力传感器通常利用应变计、电阻片或压电材料等传感器来感应物体所受的拉力或压力,并将其转化为电信号输出。该类传感器能够测量肌腱张力,为灵巧手提供力反馈控制,使机器人手能够更加精细和自然地与环境进行交互。这种传感器的设计关键在于能够准确测量由肌腱张力引起的微小作用力。在实际应用中,腱绳张力传感器的测量方式主要有三种:串联弹性体、包覆弹性体、偏置引导轮。这些测量方式各有优势,可以根据灵巧手的具体需求和设计进行选择 。
Robonaut 2 hand 是 NASA 和 GM 联合研制的,它使用弹性体构建腱张力传感器,通过测量导管对传感器的作用力来获得腱绳张力 。这种设计允许灵巧手进行精确的力控制,从而实现稳定和灵活的抓取操作。
2.2、动作/运动传感器
(1)位置传感器
关节角位置传感器是实现灵巧手位置闭环控制的关键。关节位置传感器布置在驱动器末端,通过检测驱动输出端的角度位置,间接获得关节角度位置。常用的角度位置传感器有电位计式传感器、编码器和磁敏传感器等。
Robonaut2 Hand 采用磁钢和霍尔传感器的设计方案,传感器核心部分是霍尔敏感元件,当手指关节运动时,磁钢相对于霍尔传感器发生旋转运动,霍尔传感器周围的磁场变化导致其输出信号的变化,通过相关标定处理,即可得到精确的关节角度。博洛尼亚大学设计的 UBH-IV hand 使用了基于光学测量的关节角度位置传感器。其主要原理为,关节角度变化导致 LED 发出的光被部分遮挡,通过测量通过光功率的大小反推出关节角度变化量。
(2)弯曲传感器
对于腱驱动的机械手来说,腱绳的位移总是随着套管形状的变化而变化,这种位置误差可能导致控制精度下降。因此,仅利用腱绳张力信息进行控制可能会产生误差。
在人形机器人领域,弯曲传感器可以用于精确控制腱绳的张力,无需直接测量输出张力,从而提高机器人手部动作的精确度和灵活性。例如,五邑大学的研究团队开发了一种碳基柔性弯曲传感器,这种传感器具有高分辨率、高应变系数、低迟滞、长期动态弯曲耐久性和高频响应等特性,能够识别关节弯曲的大范围运动和肌肉收缩的细微运动,为未来仿生机器人提供了学习平台 。
此外,西安交通大学邵金友教授、李祥明教授团队提出了一种一体化压电式弯曲传感器,该传感器通过将双层交叉的3D结构叉指微电极嵌入压电聚合物薄膜中,实现了高各向异性系数,使其对不同的弯曲方向更加敏感,同时在长达160万次的弯曲循环中显示出极其稳定的压电输出 。
四、灵巧手动力系统
1、分类:按照动力源
按驱动方式,灵巧手动力源可分为电机驱动、气压驱动(气动)、液压驱动与形状记忆合金驱动。
| 驱动源 | 输出力 | 运动精度 | 响应速度 | 体积 |
| 液压驱动 | 大 | 高 | 慢 | 大 |
| 气压驱动 | 小 | 低 | 快 | 大 |
| 电机驱动 | 较大 | 高 | 快 | 小 |
| 形状记忆合金 | 大 | 低 | 快 | 小 |
来源:孙成远《腱驱动灵巧手指结构设计及其运动分析与试验》
液压驱动:
利用液体介质的静压力传递能量。
优点是能够产生较大的操作力,适用于驱动大型负载。
缺点包括效率不高、可能存在泄漏、流体阻力影响、传动比不精确、体积大、成本高和易污染。
气压驱动:
使用气体作为介质,模拟人体肌肉的驱动方式。
优点是易于控制、能量储存方便、系统柔性好。
缺点是刚度低、动态性能差、装配难度大、运动不够精确,限制了其在工业生产中的广泛应用。
电机驱动:
目前多指灵巧手的主要驱动方式。
优点包括驱动力大、控制精度高、响应速度快、模块化设计、易于更换和维护。电机及集成驱动芯片的采用有利于实现手指的模块化控制,是Stanford/JPL手、DLR手和NASA手等典型灵巧手的驱动源。
形状记忆合金(SMA)驱动:
利用SMA材料在特定温度下恢复原状的特性进行驱动。
优点是位移大、功率重量比高、变位迅速、方向灵活。
适合高速度和高精度的小负载装配任务。
缺点是成本高、易疲劳、寿命较短。例如日本的Hitachi灵巧手采用SMA驱动。
综合比较驱动器类型,电机驱动的综合性能更好,具有标准化、稳定可靠、精度高、响应快、驱控一体等优势,是目前技术成熟、应用广泛的一种驱动方式。
2、分类:按照结构形式
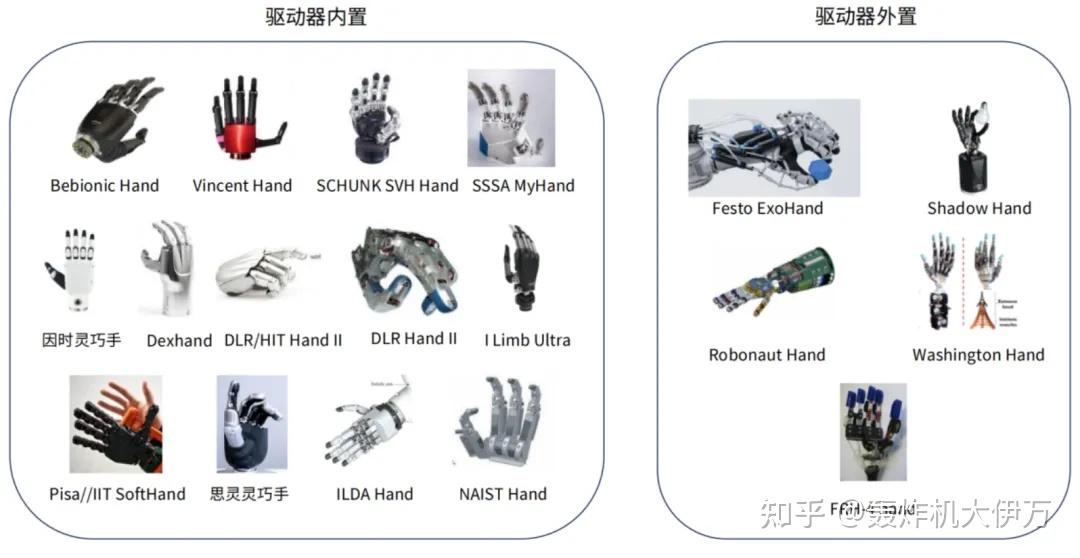
按结构形式,灵巧手可分为驱动器外置式、驱动器内置式与驱动器混合置式。
来源:《经典五指灵巧手拆机:航空航天篇人形机器人专题(一)》、《经典五指灵巧手拆机:医疗假肢篇–人形机器人专题(二)》、《经典五指灵巧手拆机:科研及通用篇–人形机器人专题(三)》
驱动器外置式:
早期的多指灵巧手一般将驱动器(如电机、液压或气动泵)被放置在手部外部,主要是受驱动器结构尺寸影响,难以嵌入手指内,典型代表 NASA 手和 Shadow 手。优点是仿人化程度较高,自由度的布置也很灵活,维护和更换驱动器组件相对容易,因为它们容易接触。缺点是驱动器与手本体之间空间距离较远,必须借助腱实现两者的连接,不可避免地具有腱传动的相关弊病。此外,这种形式的灵巧手可维护性差,当某根腱断裂时,必须进行灵巧手整体的拆卸,工作量大。
驱动器内置式:
随着材料、工艺技术的发展,驱动器的尺寸逐渐减小,灵巧手逐渐走向驱动器内置式,通常是在手指或手掌内部。内置式的优点是减少了外部电缆和管道的需求,从而减轻了手的重量,提高了灵活性和紧凑性。由于驱动器集成在手指内部,且集成度较高,可以简化手指同外部的软硬接口,便于手指模块化设计,以及加强了手指间互换性增强,便于维护和实际应用。
当然内置式灵巧手也同样存在一些问题,比如目前由于驱动器的不同及系统结构设计的思路不同导致灵巧手的整体外形尺寸较大,这也是内置式灵巧手的最大问题。
驱动器混合置式:
这种结构结合了外置和内置驱动器的特点,部分驱动器位于手部外部,而其他部分则内置。优点是可以平衡维护的便利性和手部的灵活性。例如,主要的驱动器可以内置以减少外部干扰,而辅助驱动器可以外置以便于维护。缺点可能是设计复杂性增加,需要精心规划以确保系统的协调和效率。
3、电机驱动之空心杯电机
在现代灵巧手的发展过程中,电机驱动逐渐成为主流驱动方式。作为灵巧手典型代表的 Stanford/JPL 手、DLR 手和 NASA 手均采用电机作为驱动源。从已有案例的电机选型来看,灵巧手用到的电机有直流无刷电机、无框力矩电机、空心杯有刷电机、空心杯无刷电机。如DLR/HIT Hand II、Michelangelo Hand 使用了直流无刷电机,Dexhand、Spacehand 使用了无框力矩电机。
本节来探讨下空心杯电机。空心杯电机是一种采用无铁芯转子的直流永磁伺服控制电动机,其电枢绕组为空心杯线圈,形状类似水杯,因此被称为“空心杯电机”。空心杯电机尺寸较小,直径不超过 40mm,空心杯电机主要由轴、轴承、电刷、换向器、杯形绕组(转子)、转轴、线圈、 滑动轴承、外壳、磁铁(定子)等组成。
与传统直流电机相比,空心杯电机首先具备节能特性,由于无铁芯设计彻底消除了由于铁芯形成涡流而造成的电能损耗,能量转换效率很高,其最大效率一般在 70%以上,部分产品可达到 90%以上(铁芯电动机一般在 70%)。同时具备控制特性,其起动、制动迅速,响应极快,机械时间常数通常只有十几个毫秒(铁芯电动机一般在 100 毫秒以上);在推荐运行区域内的高速运转状态下,可以方便地对转速进行灵敏的调节且运行稳定性十分可靠。
| 无刷空心杯电机 | 有刷空心杯电机 |
| 长寿命(20000h) | 电机寿命受限(2000h) |
| 高转速 | 电机转速有限 |
| 电磁干扰可忽略 | 有火花 |
| 有铁损 | 无铁损 |
| 需要驱动控制 | 控制简单 |
根据换向方式的不同,空心杯电机可分为有刷空心杯电机和无刷空心杯电机,有刷电机转子无铁芯,无刷电机(又称无刷无齿槽电机)定子无铁芯。有刷空心杯电机采用机械换向,利用碳刷(或者金属电刷)和换向器的配合来完成换向,但由于电刷和换向器存在相对滑动,容易损耗。无刷空心杯电机没有这种物理结构,其定子部分使用空心杯绕组,采用无齿槽铁芯设计,线圈导线直接连接到控制器,通过处理连接板上的霍尔反馈的位置信号完成换向。无刷空心杯电机适用于需要长时间连续运行和具有较高控制要求或可靠性要求的应用场景,有刷空心杯电机适用于对产品灵敏性和可靠性要求较高的行业,从发展趋势上看,未来更偏向无刷空心杯电机。已 有 的 灵 巧 手 案 例 中 ,Pisa//IIT SoftHand、Vincent Hand、Ilimb Ultra、IDLA hand 均使用了空心杯有刷电机,而 RIC Arm 则使用了空心杯无刷电机。
来源:电机设计工艺工程公众号,电机通公众号,《马鞍形空心杯电机线圈绕制设备研究》,专利检索及分析,华安证券研究所
目前空心杯电机存在两大核心技术壁垒:一方面在于空心杯电机绕组的设计及工艺,另一方面在于绕线设备,国产替代需在此发力。
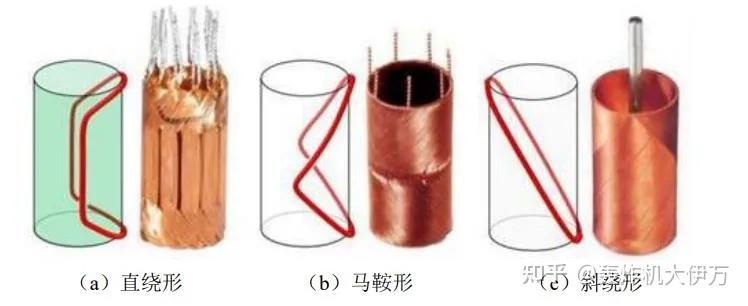
(1)直绕形空心杯线圈绕组的设计和加工:空心杯线圈绕线方式主要有直绕形、马鞍形和斜绕形3种。其中,直绕形绕制方法工艺较为复杂,斜绕形和马鞍形在绕制工艺上相对简单,国内外厂商大多采取斜绕形和马鞍形两种方式。
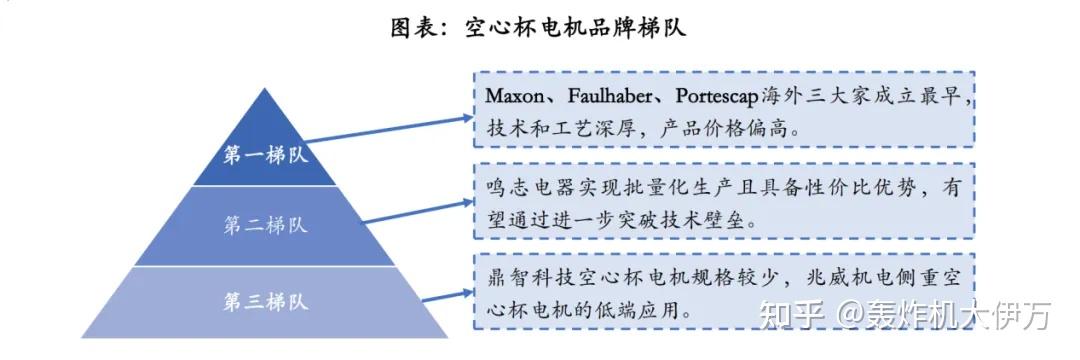
空心杯电机设计要点在于追求小型化的同时提供效率更高、更大的输出,因此线圈绕组设计是核心影响因素,包括绕线方式和绕组参数,掌握相关工艺的厂商具有核心竞争力。Maxon主要采用马鞍形绕组方式、Faulhaber主要采用斜绕形绕组方式,而它们绕线的具体工艺处于保密状态,目前鸣志电器采用直绕形工艺,但是它拥有一种新型的绕组结构专利,可以减小直绕形端部的线圈厚度,从而在很大程度上弥补了直绕形工艺的不足。
(2)空心杯线圈绕线设备:空心杯电机线圈的生产技术主要分为人工绕线、绕卷式生产技术和一次成型生产技术。目前,我国大多数厂商采用绕卷式生产技术,海外厂商主要采取一次成型生产技术。产品的一致性、长寿命和批量化生产需要自动化产线,如果想实现线圈高精度高效率生产,以及最终电机质量提升,必须采用自动化生产以及先进的绕线设备。欧洲及北美厂商对于空心杯线圈绕制设备发展较早,技术较为先进,绕制线圈的质量和效率具备较大的优势,国内厂商需要持续提升针对绕制设备的研发才能够使线圈及空心杯电机质量提升,持续向上拓展中高端的空心杯电机市场。Maxon、Faulhaber的自动化生产设备是自研自制,不对外销售。国内生产商主要采用半自动/手工生产,其中鸣志电器的绕线机采购自日本小田原&田中精机,主要采用半自动生产,返工率高 (国内万分之三十,国外万分之五) 。
五、灵巧手传动系统
灵巧手的传动系统是其机械结构中的核心部分,它负责将输入的动力转换为手指关节的运动。根据不同的设计需求和应用场景,灵巧手的传动系统可分为腱绳传动、连杆传动与齿轮传动。
腱绳传动是目前灵巧手研究中应用最为广泛的一种传动方式,最类似于人手的肌腱结构,适合空间狭小且需要驱动自由度数量较多的场合,但控制精度不高、抓取力不足;齿轮/蜗轮蜗杆传动式可以实现高控制精度,但结构复杂,成本较高,在工业机器人中应用比较广;连杆驱动式能够抓取大型的物体且结构设计紧凑,但是在远距离的控制上就比较困难,抓取的空间较小,多用于工业和商业用途,多个连杆串并联混合的使用形式较为常见。
| 传动方式 | 特点 | 缺点 |
| 腱传动 | 由腱(钢丝绳、迪力马绳等)加上滑轮或者软管实现传动。腱一般具有很高的抗拉强度和很轻的重量,容易实现多自由度和远距离动力传输,节省空间和成本,是一种柔顺传动方式 | 腱本身的刚度有限,影响位置精度;控制时需要一定的预紧力,容易产生摩擦;腱的布局容易产生力矩和运动的耦合。这些因素都增加了手爪抓取控制的难度和复杂性 |
| 连杆传动 | 采用平面连杆机构传动,刚度好、出力大、负载能力强、加工制造容易、易获得较高的精度,构件之间的接触可以依靠几何封闭来实现,能够较好实现多种运动规律和运动轨迹的要求 | 结构冗杂,笨重,柔性不足,抗冲击性能较弱,对手内空间配置要求较高 |
| 齿轮/蜗轮蜗杆传动 | 驱动器通过齿轮或蜗轮蜗杆将旋转变成直线运动,拉动驱动器和手指之间的弹簧来驱动手指产生动作,手指部分采用金属连接,各个手指动作相互独立,具有多种的抓取构形,和别的多指灵巧手相比,驱动更加灵活,但是手指的闭合时间较长 | 结构冗杂,笨重,柔性不足,抗冲击性能较弱,对手内空间配置要求较高,手指的结构比较复杂,容易出现故障 |
| 人工肌肉(液压/气压) | 液压驱动和气动的驱动方式是近年来兴起的一种重要的驱动方式,是模拟人肌肉的一种驱动方式 | 由于材料和技术的限制,这些“人工肌肉”技术还远远不能满足机器人手爪实现可靠、快速和精确地抓取功能 |
来源:小米技术公众号《机器人中的“百达翡丽”- 五指精密仿生灵巧手技术浅析》
1. 腱绳传动(Tendon-Driven Mechanisms)
腱绳传动系统使用类似人类手指的腱和绳索结构,通过拉动或放松绳索来驱动手指的关节运动。一般电机通过齿轮箱驱动滚珠丝杠,通过滚珠丝杠上的螺母把旋转运动转换为直线运动,腱绳形成一个腱环套在螺母上,螺母拉动连接在灵巧手手指指骨上的腱绳,实现手指绕关节轴的转动运动。其中为了引导腱绳的走线,避免腱绳之间的干扰,采用腱绳外包裹导管的形式。相比连杆、齿轮等传动方式,腱传动对于空间狭小、传动精密的灵巧手空间设计较为友好,但传动效率与可靠性较差。
资料来源:韩如雪《腱驱动空间多指灵巧手感知与控制关键技术研究》
- 优点:
灵活性:可以在有限的空间内实现复杂的运动,适合模拟人手的自然运动。
轻量:相对于机械结构,绳索和腱的重量较轻。
简化设计:通过绳索的布置可以简化机械结构,降低复杂度。
- 缺点:
耐用性:绳索可能会磨损或断裂,需要定期维护和更换。
调节难度:绳索的张力和路径需要精确调整,可能需要复杂的调整机制。
力传递效率:相比于机械传动,腱绳传动的力传递效率可能较低。
- 应用: 适用于需要高灵活性和较自然运动的灵巧手设计,如仿生机器人手或教育机器人手。
腱绳材料选择
在腱传动灵巧手中,腱绳材料的选择至关重要。因为腱绳涉及动力传递,且作为末端传递单元,直接影响手指执行效果的精度,所以腱绳需要满足的要求包括:
1) 高强度:需承受 80N 以上的力;
2) 低耐磨:连续施加 36000 次循环的恒定拉力(10h);
3) 固定表面摩擦系数低;
4) 可以承受小的弯曲半径;
5) 易于实现终止;
6) 抗蠕变性(可通过闭环策略进行补偿)。
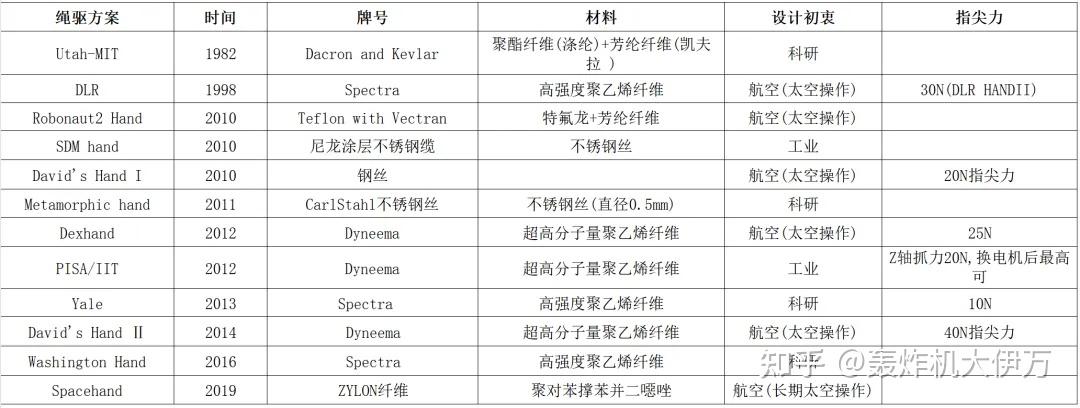
通过对已有腱传动灵巧手案例中腱绳材料的统计,我们发现:
1) 腱绳材料整体分为不锈钢、高分子纤维两大类,其中高分子纤维使用更为广泛;
2) 高分子纤维中以 Dyneema 和 Spectra®两种纤维为主流,分别为帝斯曼和霍尼韦尔生产的超高分子量聚乙烯纤维材料;
3) 早期使用的腱绳材料有特氟龙、芳纶纤维、涤纶等,但因性能方面不如超高分子量聚乙烯纤维而被淘汰;
4) ZYLON 纤维在长期作业方面优于超高分子量聚乙烯纤维,在某些恶劣场景、长期高负载运行情况下可以代替超高分子量聚乙烯纤维。
来源:《经典五指灵巧手拆机:航空航天篇——人形机器人专题(一)》、《经典五指灵巧手拆机:医疗假肢篇–人形机器人专题(二)》、《经典五指灵巧手拆机:科研及通用篇——人形机器人专题(三)》、光大证券研究所整理
2. 连杆传动(Linkage Mechanisms)
连杆传动系统通过一系列连杆和铰链连接来传递和转换力,实现手指的运动。通常,驱动器通过连杆系统直接作用于手指的关节。
连杆传动中的指尖、二指节、三指节均为不同形状的三角形连杆,驱动连杆以及耦合连杆为直线形式,K1 以及 K2 为复位弹簧,当 K1 处的驱动连杆顺/逆时针转动时,手指做屈曲/前伸运动。
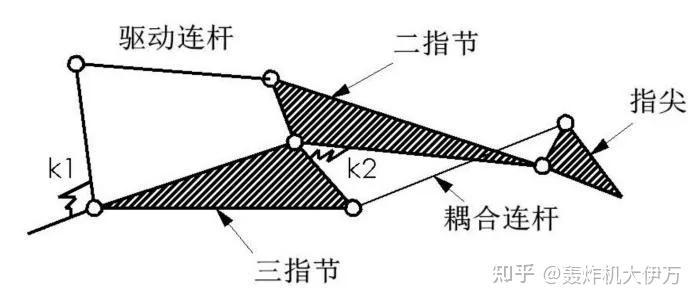
连杆传动手指示意图来源:严玺《仿人灵巧手的结构设计及其控制研究》
- 优点:
稳定性:连杆结构提供稳定的力传递,传递的刚性比较强,能够承受较大的负载。
精确控制:可实现精确的运动控制,适合高负载或需要高重复精度的任务。
耐用性:机械结构耐磨损,使用寿命长。
- 缺点:
体积较大:相对于腱绳传动系统,连杆传动结构较为庞大。
复杂性:设计和制造复杂,可能需要较高的精度和更多的组件。
灵活性限制:连杆手指受连杆尺寸以及传动误差的影响,不易实现远距离操作,抓取稳定范围较小。
- 应用:适用于需要高负载能力和高精度控制的灵巧手设计,如工业自动化和精准操作任务。
3. 齿轮传动(Gear-Based Mechanisms)
齿轮传动系统利用齿轮啮合来传递力和运动。通过不同齿轮的组合,可以实现复杂的运动和力传递。

来源:Giulio Cerruti《Design and Control of a Dexterous Anthropomorphic Robotic Hand》
- 优点:
高效力传递:能进行精确传动,传递效率高、稳定性好。
耐用性:齿轮结构坚固,耐磨损,适合长时间使用。
精度:可以实现非常高的运动精度。
- 缺点:
体积和重量:结构相对复杂,齿轮系统通常较为笨重,占用空间大。
成本:制造和维护成本较高,齿轮的精密加工要求较高。
噪音:齿轮啮合可能产生噪音。
- 应用:适用于需要高精度和高效率的灵巧手设计,如医疗机器人、研究用机器人等。
4、 案例:特斯拉灵巧手
在灵巧手机械传动系统的设计中,Utah/MIT 手、DLR I 手、NASA 手均采用腱(绳索)传动的方式,其主要原因是受到驱动源、驱动电路板以及减速结构等的体积限制,使得这些部件不能集成到手掌或手指内部而需要放在灵巧手以外的空间。但是,腱传动在实现空间布置自由的同时,存在不可忽视的缺陷:连接复杂、可靠性差;由于腱的柔性,使得控制精度低、存在迟滞等。
相对于腱传动方式,DLR II 手、GIFU II 手等采用齿轮、齿形皮带等直接传动的方法,具有腱传动无法比拟的优点:可靠性高、迟滞小等。同时,直接传动方式对驱动、减速结构与转动关节的空间位置有较高的要求,一般将电机、减速结构等集成在手掌或手指内部时,可以采用直接传动的方式。
因此,在电机、减速结构等体积不能做得更小的情况下,腱传动与直接传动相结合的方法将会保留两者的优点,凸显其独特的优势。
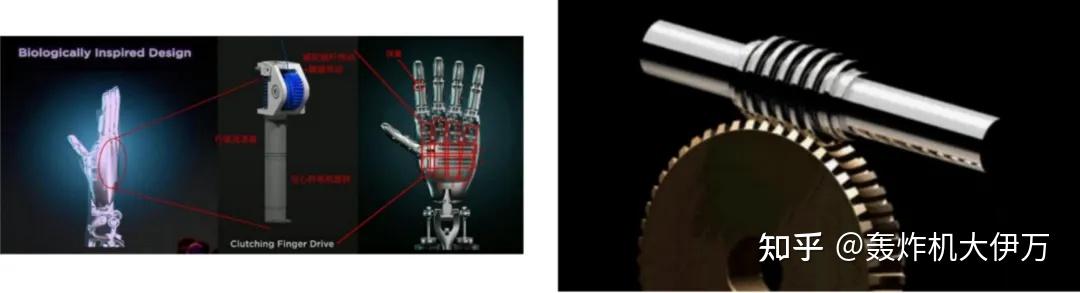
特斯拉 Optimus灵巧手用 6 个执行器来操作 5 根手指,其中拇指分配2 个执行器,其他手指各分配 1 个执行器。手指执行器采用空心杯电机+蜗轮蜗杆传动+腱传动。一方面,特斯拉 Optimus 采用了经典的六电机方案,在电机数量有限的情况下最大程度上实现手指自由度;另一方面,蜗轮蜗杆的不可反驱动特性使得灵巧手可以在抓握完成后实现无功耗保持。
特斯拉灵巧手使用腱绳传动系统来实现手指的精确控制。类似于人类手指的腱和绳索结构,通过电机驱动的齿轮和滚珠丝杠将旋转运动转换为直线运动,螺母通过与腱绳相连,将直线运动传递给腱绳,腱绳形成一个环状结构,绕在螺母上,带动手指关节运动。【蜗轮蜗杆传动的一个重要特性是其自锁功能,即在没有外部力作用的情况下,一旦达到某个位置,系统可以保持该位置而不需要持续的能耗。这对于灵巧手来说非常有用,因为它可以在抓握物体后保持位置,而不需要持续消耗能量。】
六、部分灵巧手案例
国外案例
1、特斯拉,前面有讲述。
2、SCHUNK:SVH
SCHUNK 成立于 1945 年,2014 年,SCHUNK 对外发布五指伺服电动机械抓手 SVH,分为左手和右手两个版本,现已实现批量生产。
SVH五指手是一种高度仿真的机械手,拥有9个驱动器,能够执行多种抓取动作,具有高灵敏度。它的控制、调节器和电源电子等电子装置完全集成在腕关节中,整体设计非常紧凑。
SVH五指手24V DC的低能耗,适用于移动应用。此外,还可以通过ROS(机器人操作系统)驱动程序进行控制,适用于ROS1和ROS2。SVH五指手不仅适用于新的抓取和操纵任务,还通过手势为人类与机器人之间的交流提供了新的可能性。
根据市场情况,SCHUNK SVH五指手的价格可能相对较高,例如在某些情况下报价可能在70万元人民币以上。

3、 Shadow Robot:Shadow Hand
Shadow Robot 成立于 1987 年,最初只是一个业余爱好者团体,现已成为英国运营时间最长的机器人公司。Shadow Hand 是世界上最先进的五指机械手,其设计目的是提供与人手相当的力输出和运动精度。Shadow Hand 系统已被用于抓握、操纵、神经控制、大脑计算机接口、工业质量控制和危险材料处理等方面的研究。
Shadow Hand 一共拥有 24 个自由度,其中 20 个由电机驱动,4 个欠驱动。这 24个自由度每一个都有与人类相近的运动范围,允许其做出与人手类似的动作。它还具备了 129 个内置传感器,包括关节位置传感器,温度传感器,力反馈传感器,肌腱张力、指尖触觉传感器等,可以对环境进行触觉感应。

4、 qb Robotics:qb SoftHand
qb Robotics 成立于 2011 年,qb SoftHand是由QB Robotics公司开发的一种基于软机器人技术的拟人机器人手。qb SoftHand符合ISO 12100, ISO 13849-1/-2等国际标准,它具有19个自由度,设计上模仿了人类手的结构,具有高度的灵活性和适应性。qb SoftHand可以通过单个电机进行控制,实现即插即用,易于控制。此外,它还支持URCaps插件,可以与Universal Robots的协作机器人配合使用。

5、Clone Robotics:Clone Hand
Clone Hand是一款高度仿真的机械手,它采用先进的肌肉骨骼技术,旨在模仿人类手臂的结构和功能。其设计灵感来源于《西部世界》中的仿生机器人,它的外观和动作都尽可能接近真实的人类手臂。Clone Hand的结构中,唯一坚硬的部分是骨骼,其余部分如肌腱、血管、脂肪和皮肤组织等都采用柔软的面料来模仿。骨骼部分由碳纤维制成,强度高且成本低。
它采用液压驱动,使用的介质是水,具备27个自由度,能够执行各种复杂的手部动作,如握拳、转动手腕等。

国内案例
1、思灵机器人:Dexterity Hand
思灵机器人 (AgileRobots)创立于2018年,是一家全球领先的AI智能机器人明星企业,其技术源自于德国宇航中心机器人研究所(DLR/RMC) 。Dexterity Hand 于 2020 年完成第一代开发,主要面向服务、康复理疗、危险环境作业、空间探索等应用场景。
Dexterity Hand 五个手指的设计模仿了人手的运动,是世界领先的高度集成化和模块化的多指力控机器人灵巧手,由4个模块化的多关节手指和1个具有主动对掌功能的拇指组成,整手集成了多种传感器,包括力传感器和位置传感器,这些传感器的融合使用可以提高抓取算法的精确性和适应性。
Dexterity Hand 驱动系统采用“直流伺服电机和二级减速器”方式,确保了手指和拇指的大力输出和快速响应,同时具备机械自锁功能。指尖的最大输出力可达10N,这使得其能够处理较重或需要较大力量的物体。

2、因时机器人:RH56BFX 系列/ RH56DFX 系列
因时机器人成立于 2016 年,其仿人五指灵巧手采用创新型直线驱动设计,具有 6 个自由度和 12 个运动关节,结合力位混合控制算法,可以模拟人手实现精准的抓取操作。其中,因时机器人 RH56DF3 系列灵巧手抓握力大,速度适中,适用于机器人或假肢的抓取操作。RH56BFX 系列灵巧手又称钢琴手,速度快、抓握力稍小,集成力传感器,适用于弹钢琴及手势交互等场景。
因时是国内机器人核心零部件及末端执行器供应商,其微型伺服电缸体积小,采用驱控一体化设计,功率密度高,精度达±0.02mm。因时机器人灵巧手内部装有6个小型伺服驱动器,集成无刷电机、行星减速机、直线导轨、绝对位置检测传感器和力传感器,除大拇指拥有2个驱动器外,其余四指各配备1个驱动器。因时机器人灵巧手将微型驱动器等部件置于手掌内部,在控制灵巧手体积的同时,也利于传感器直接测量,方便维修,预计将成为未来灵巧手设计的重要方向。

图来源:因时机器人官网
3、蓝胖子机器智能(dorabot):DoraHand
深圳蓝胖子机器智能有限公司成立于 2014 年。
DoraHand是一款模块化设计的多指灵巧手,采用模块化手指和手掌设计,每根手指都有独立的驱控和感知单元,可以独立工作,并且支持热插拔,这降低了维护难度并提高了实用性。
DoraHand拥有各类传感器共42个,每根手指和手掌配备的力触感知单元能够获取1024级的有效力信号,并且可以在感知力的大小的同时获取施力位置。它具有多个自由度,能够组合出多种手势,适应并满足大部分生活场景中的物体抓取需求。
此外,DoraHand的自主设计的力触感知模块单元能够降低产品对昂贵进口传感器的依赖,极大降低产品零件成本,使得产品具有高性价比。蓝胖子灵巧手可应用于科研、服务、物流等多个领域,为不同行业提供定制化的解决方案。

DoraHand 外观图来源:蓝胖子机器智能官网
4、腾讯 Robotics X 实验室:TRX-Hand
腾讯 Robotics X 实验室成立于 2018 年,目前实验室的研究方向包括作为机器人基础技术的视觉、触觉等感知能力,以及灵敏运动、灵巧操控、智能体三大支柱技术。2023 年 4 月 25 日,腾讯 Robotics X 实验室推出自研机器人灵巧手 TRHand,该手在指尖、指腹和掌面均覆盖了自研的高灵敏度柔性触觉传感器阵列,掌心处安装有微型激光雷达和接近传感器,同时每一个关节均集成了角度传感器,保证灵巧手在抓取和操作过程中能准确地感知自身与物体状态信息。
参考资料:
1.财通证券,机器人新型末端执行器,国内外研究进展加速;
2.光大证券,经典五指灵巧手拆机:腱绳材料的选择
3.长城证券,灵巧手:人形机器人中必不可少,有望带动空心杯电机及传感器市场持续增长
4.浙商证券,灵巧手:人形机器人硬件迭代核心模块
5.光大证券,动力、传动、传感:灵巧手分析框架与零部件选型
6.量子位,腾讯把手伸向了调酒
7.AppSo,1:1 仿生人手,这家公司居然想造「西部世界」机器人